

Speċifikazzjoni
Karatteristiċi

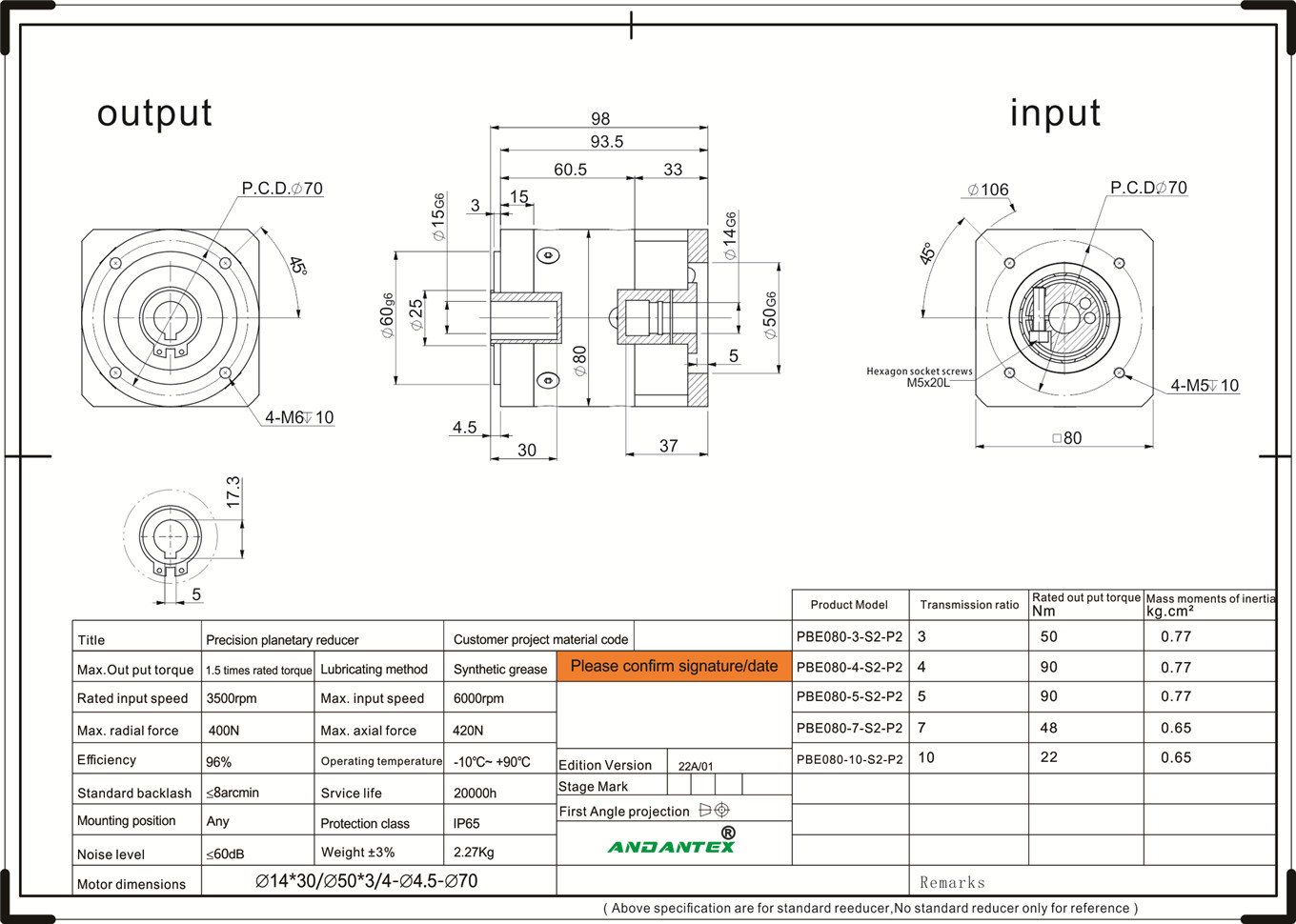
1. Dehra tonda: L-istruttura tal-output tal-flanġ tond PBE hija ddisinjata f'forma tonda, li għandha dehra kompatta.
2. Miżuri protettivi speċifiċi: L-output tal-flanġ tond PBE huwa ġeneralment protett minn qoxra jew qoxra protettiva, li effettivament tista 'tipprevjeni d-dħul ta' trab estern u debris u ttejjeb is-sigurtà u l-affidabbiltà tat-tagħmir.
3. Dehra qawwija u nadifa: id-dehra tal-ħruġ tal-flanġ tond PBE hija ġeneralment sprejjata jew galvanizzata u proċessi oħra ta 'trattament, sabiex il-wiċċ tiegħu jkun lixx, mhux faċli biex sadid, b'ċertu grad ta' sbuħija.
4. Struttura tal-pjanċa tat-tarf: Il-pjanċa tat-tarf tal-output tal-flanġ tond PBE ġeneralment għandha toqob tal-boltijiet fissi jew toqob tal-igganċjar għall-konnessjoni ma 'xaft tal-ħruġ jew apparat tal-akkoppjar.
Applikazzjonijiet
Gearboxes planetarji tal-flanġ ċirkolari għandhom firxa wiesgħa ta 'applikazzjonijiet fl-industrija tad-driegħ robotiku, prinċipalment fl-oqsma li ġejjin:
1. Trażmissjoni tal-enerġija: Jista 'jikkonverti l-output ta' veloċità għolja u mutur ta 'drive ta' torque baxx għal veloċità baxxa u output ta 'torque għoli, li jipprovdi appoġġ qawwi ta' qawwa għad-driegħ robotiku, li jippermetti li d-driegħ robotiku jiflaħ tagħbijiet akbar u jwettaq kompiti aktar kumplessi.
2. Kontroll tal-moviment: Bi struttura ta 'trasmissjoni ta' preċiżjoni għolja, jista 'jirrealizza kontroll preċiż tal-moviment tad-driegħ tar-robot, bħal pożizzjonar, rotazzjoni u jitbandal, biex jiżgura li t-trajettorja tal-moviment tad-driegħ tar-robot tkun preċiża.
3. Struttura kompatta: Id-disinn kompatt jista 'effettivament inaqqas il-volum u l-piż tad-driegħ robotiku, itejjeb il-flessibilità u l-mobilità tad-driegħ robotiku, u jadatta għal ambjent tax-xogħol aktar Kumpless.
Kontenut tal-pakkett
1 x protezzjoni tal-qoton perla
1 x fowm speċjali għal shockproof
1 x kartuna speċjali jew kaxxa tal-injam











